yinlong.shi@hepagreat.com
158 5015 0848
主页
关于我们
产品与服务
优选案例
联系我们
项目详情介绍
主页
优选案例
项目详情介绍
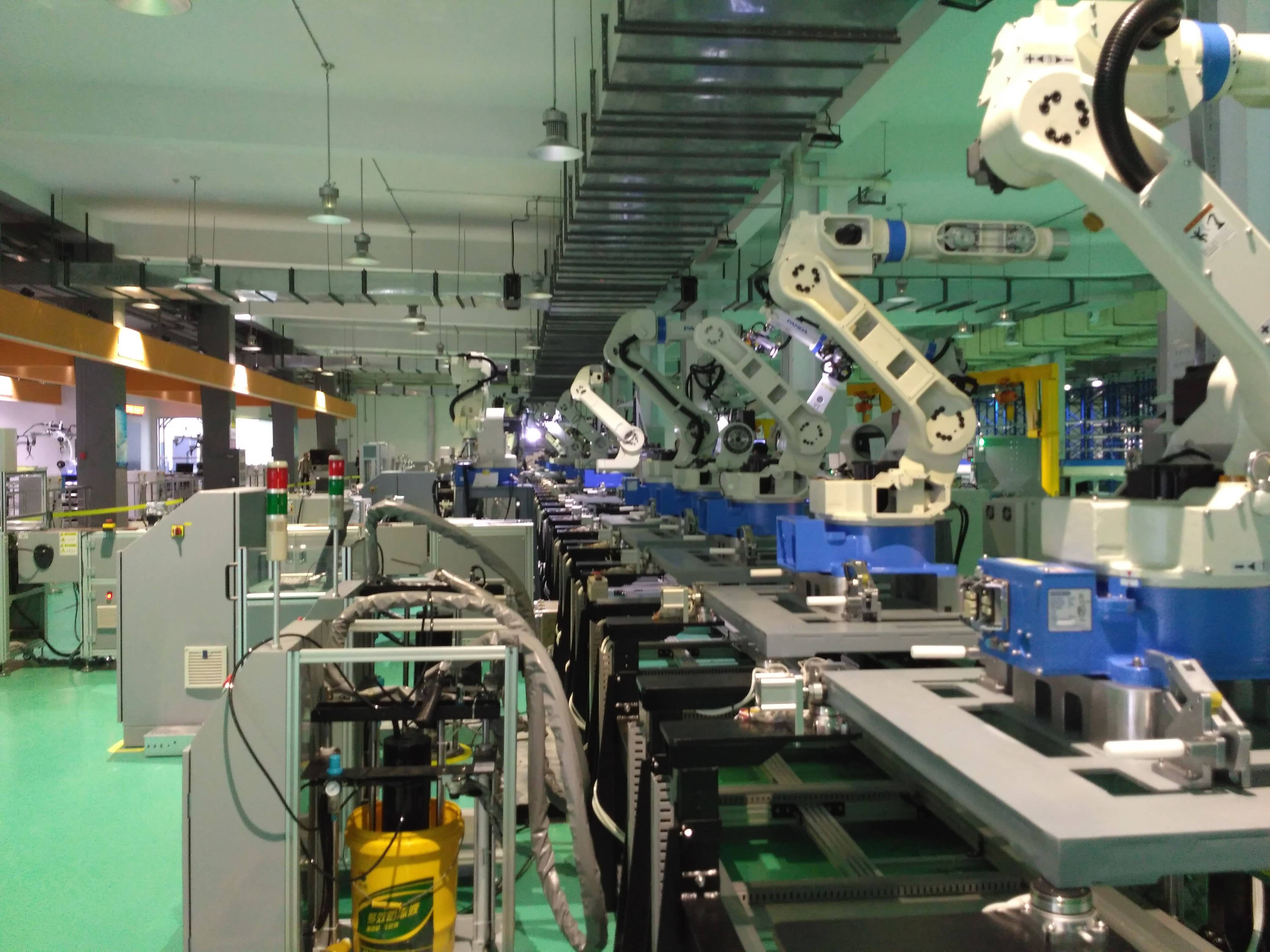
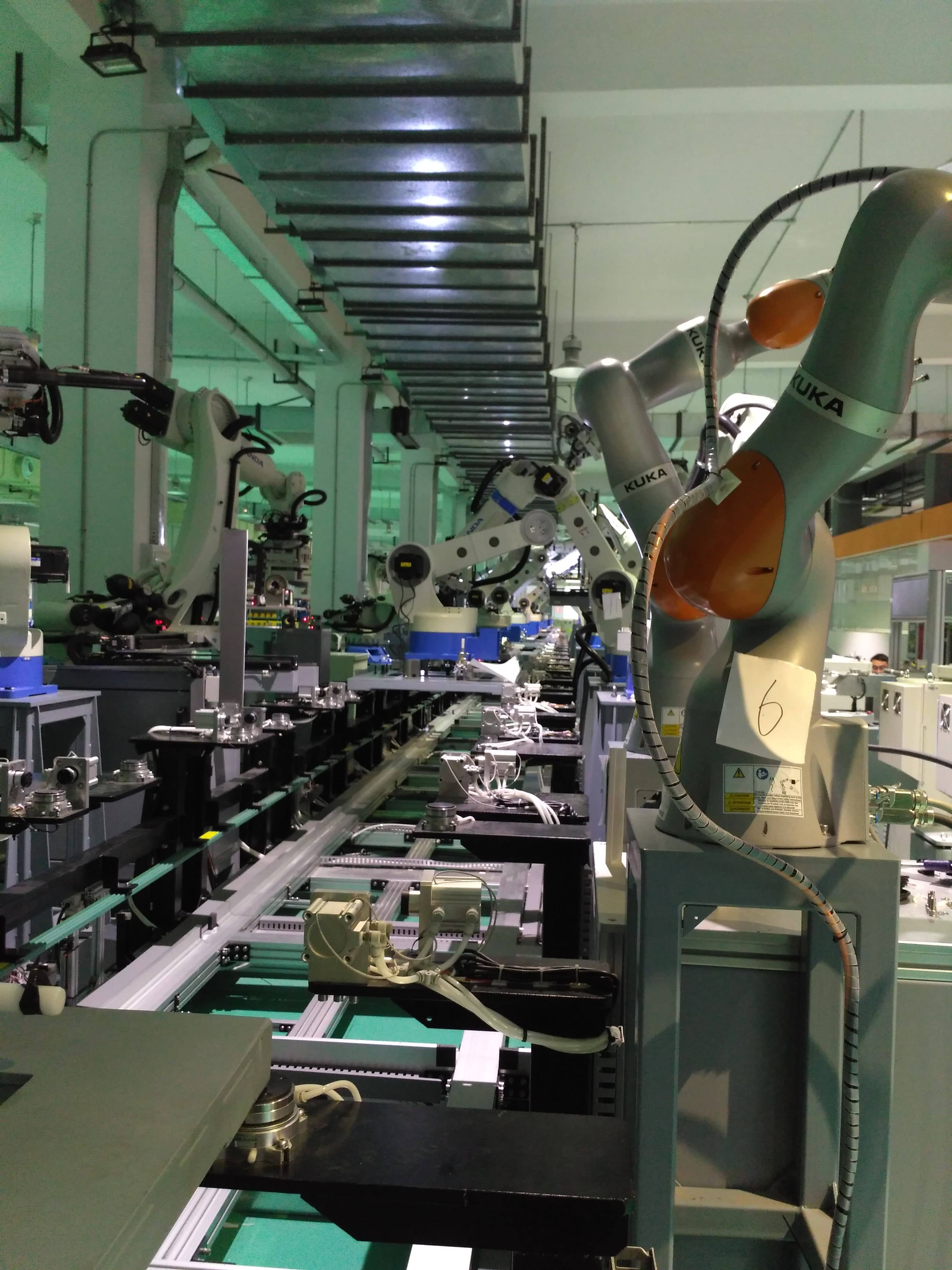
机器人组装项目
项目要求
: 机器人各关节组装
客户
: 上海某客户
项目概况
整条线体分20个工位,共计43个相机,均采用1000万像素工业相机,进行法兰盘xy方向的实时定位,同时采用20个激光位移传感器计算角度的偏差,精度±0.5mm.